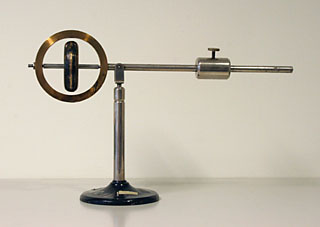
Use the motor to spin up
the gyroscope. The counterweight produces a torque about
a
horizontal axis through the pivot point and can be adjusted to
balance
the gyroscope so there is no precession, or moved in or out to
cause
the system to precess in different directions.
We also have a bicycle wheel version of this, whose parts are
in W107, and which can be hung from the unistrut grid or from
tall ringstands with extra bracing. Spinning it up by
hand is sufficient.